Tutorial: tagging parking=surface efficiently with MapRoulette
Posted by mvexel on 7 November 2022 in English.Americans love cars. More than 90% of households own one, more than 20% of households own 3 or more. Cars stand still most of the time and for that, we need huge amounts of parking.

Image source: Flickr Commons
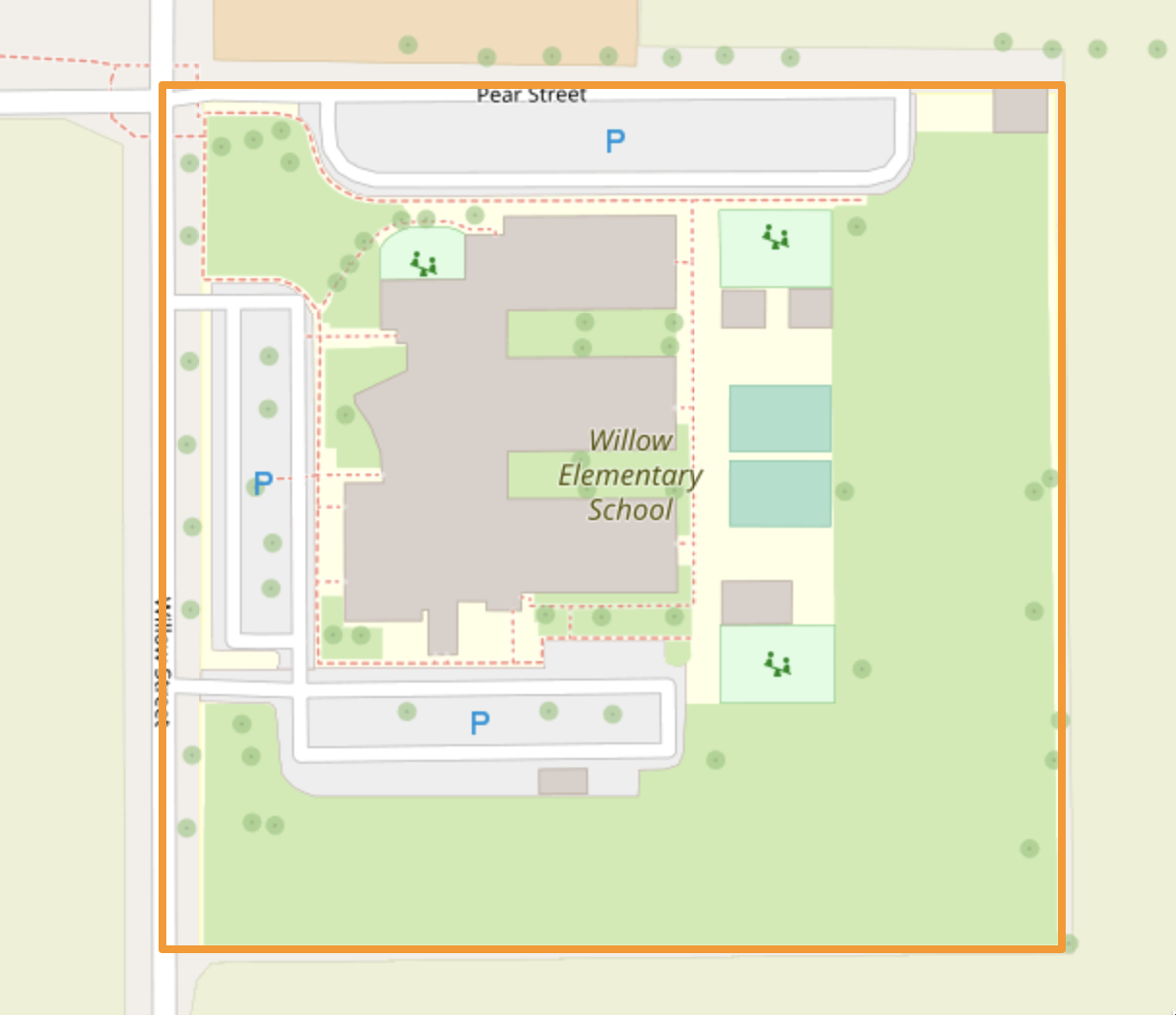
The simplest way to map a parking area in OSM is to draw an area and mark it amenity=parking. It will then show up on the map as a grey area with a blue “P”. In the United States, almost a million areas exist with the amenity=parking tag.