
Exactly one year ago I published my first visualization of the global OpenStreetMap data density. This is the updated 2014 edition.
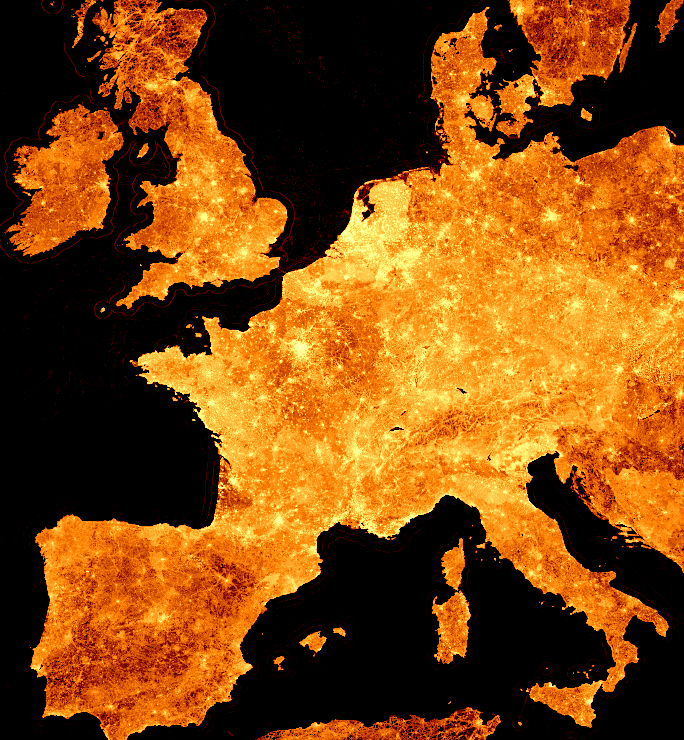 (click image for slippy map or here for high-res images)
(click image for slippy map or here for high-res images)
{kind=link}
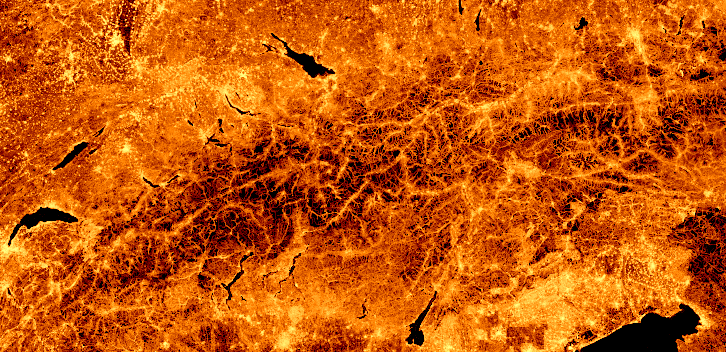
Each pixel shows the number of nodes in its corresponding area¹. But this year every point that has data in it is shown (i.e. there is at least one node at that location - last year only locations with more than 1000 nodes were included). Also, the slippy map has two more zoom levels which reveal even more impressive details like on this crop of the central Alps:
Here is a low-zoom image of the whole planet:

¹ Yes, this is Mercator map tile area, not actual on-the-ground area. Keep this in mind when comparing regions at different latitudes!
² Copying: visualizations © Martin Raifer, CC-BY - source data © OpenStreetMap contributors, ODbL
PS: The visualizations are based on a planet file I downloaded one or two weeks ago. It was processed using some custom scripts based on node-osmium, the graphics were made with gnuplot (just like last years’) and finally the map tiles for the slippy map were cut using imagemagick. I could probably explain the individual steps in a separate blog post, if anyone was interested - let me know!
Discussion
Kommentar frå imagico, 27 juni 2014 kl. 11:15
Very nice. Maybe you could publish the color scales for the different zoom levels, i.e. what color represents how many nodes per web mercator square kilometers.
Converting the data to real densities should be relatively easy by multiplying with the area scaling function of the projection. This would lighten up the polar regions quite a bit, Greenland for example is is fact mapped with similar node density in the north and south.
Kommentar frå Endres Pelka, 27 juni 2014 kl. 14:14
Yes, please publish the individual steps. I’d like to render a similar map, but only for some smaller regions and with higher zoom levels :)
Kommentar frå HannesHH, 28 juni 2014 kl. 10:27
That’s gorgeous! I want that Europe image framed on my wall. :)
Kommentar frå marscot, 28 juni 2014 kl. 11:12
that is a great picture
Kommentar frå grin, 28 juni 2014 kl. 16:45
Beautiful, thank you very much!
Kommentar frå AnnaPS, 28 juni 2014 kl. 18:04
This is gorgeous. I’d love to see a blogpost with the individual steps!
Kommentar frå Noro Hibu, 12 august 2014 kl. 07:15
I am interested. Please tell in detail how you did it)
Kommentar frå stev, 15 februar 2015 kl. 17:57
Hi,
I’m writing a thesis on whether Hadoop / other “big data” tools might be useful to analyse OSM data (https://lists.openstreetmap.org/pipermail/dev/2015-January/028227.html) so this is the sort of operation that it would be great to compare. If you have any further details about how you did it I would be much obliged.
Thanks
Stephen
Kommentar frå Enock4seth, 29 april 2015 kl. 20:05
Awesome! I like it.
Kommentar frå goclem, 9 februar 2017 kl. 09:39
Thanks a lot for this map! I was wondering what was the maximum number of nodes in one pixel of your map. I understand that the minimum is 1000. Best, Clément
Kommentar frå tyr_asd, 9 februar 2017 kl. 10:01
@goclem: In this visualization (as well as the updated one) from 2016, there is no minimum number of nodes in a pixel. The maximum depends very much on the zoom level you’re looking at. Frederic’s analysis from 2013 may give you some more insight into what absolute numbers one might have to expect.